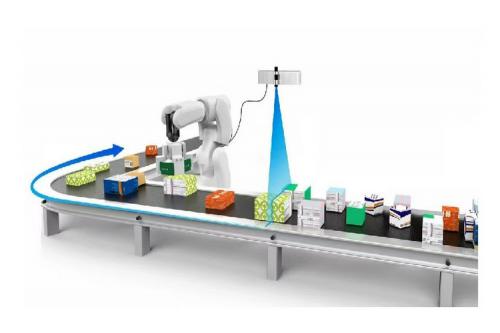
2D 视觉引导系统构成1.相机布置:在分拣机器人的顶部或侧面安装工业相机,用于拍摄传送带上的包裹图像。相机的视野范围能够覆盖整个传送带的工作区域,确保可以看到所有经过的包裹。2.图像处理单元:配备专门的图像处理软件,能够快速处理相机拍摄的 2D 图像。视觉引导过程1.包裹图像采集:当包裹在传送带上移动时,相机实时拍摄包裹的图像。图像内容包括包裹的形状(如方形、圆形、不规则形状)、外观标记(如快递单号、品牌标识等)。2.图像识别与分类:①形状识别:通过轮廓分析算法,识别包裹的形状。例如,对于方形包裹,通过检测图像中四边形的轮廓来确定其形状。对于不规则形状的包裹,采用基于形状描述子(如 Hu 矩)的算法进行识别。②标记识别:利用光学字符识别(OCR)技术识别包裹上的快递单号、文字信息等。通过字符分割、特征提取和分类识别等步骤,将文字信息转换为计算机可识别的文本。同时,也可以识别包裹上的品牌标识,用于分类。例如,通过预先存储的品牌标识模板与图像中的标识进行匹配,确定包裹所属的品牌或商家。3.分拣路径规划与引导:①路径规划:根据包裹的分类结果,确定分拣机器人的分拣路径。如果是按照目的地分拣,机器人将包裹分拣到对应的出货通道;如果是按照品牌分拣,将包裹放置到相应品牌的存储区域。路径规划需要考虑机器人的运动轨迹、传送带的速度和位置等因素。例如,计算出机器人从当前位置到目标分拣位置的最短路径,同时避免与其他机器人或障碍物发生碰撞。②实时引导:在分拣过程中,视觉系统持续监测包裹的位置和运动状态。当包裹位置发生变化或出现意外情况(如包裹倾倒)时,视觉系统能够及时调整机器人的分拣动作,确保包裹能够准确地被分拣到目标位置。应用效果1.提高分拣效率:2D 视觉引导使物流分拣机器人能够快速、准确地分拣包裹。例如,机器人每小时可以分拣数百个包裹,比人工分拣效率提高了数倍。2.降低错误率:通过精确的图像识别和实时引导,减少了分拣错误。例如,包裹分拣的准确率可以达到 99% 以上,降低了因分拣错误导致的物流成本增加和客户投诉的风险。