

在注塑车间里,有这样一道工序常常被忽视,却又让无数生产主管头疼不已——当一件件精美的注塑件从模具中脱出时,它们身上还拖着一条“尾巴”,也就是注塑口残留的料棒。这道掰料棒的后处理工序,至今在大量工厂里仍依赖人工完成。而3D视觉引导技术的成熟,正在为这一环节带来颠覆性的变革。
一、为何要革“人工掰料”的命?
注塑件从模具取出后,通过浇注系统形成的料棒与产品本体紧密相连。这个多余的部分必须去除,才能得到合格的产品。传统的人工掰料看似简单,实则问题重重:长期重复的腕部发力容易导致操作工患上腱鞘炎等职业病;对于不同材质的料棒,所需力度各异,人工操作难以保证断口一致性;更重要的是,人工操作受体力与注意力限制,长时间作业后效率下降,难以保持稳定节拍,而机器人可以不知疲倦地持续工作,保证后处理环节的稳定输出。
3D视觉引导技术正是为解决这些痛点而生,它让机器人能够像熟练工人一样“看见”料棒、“感知”力度,实现高效精准的自动化掰料。
二、技术解密:机器如何“看见”料棒?
要让机器人自动完成掰料动作,首先得让它准确识别出哪里是产品、哪里是料棒。这个过程分为三个关键环节:
第一步:三维感知,分清主次
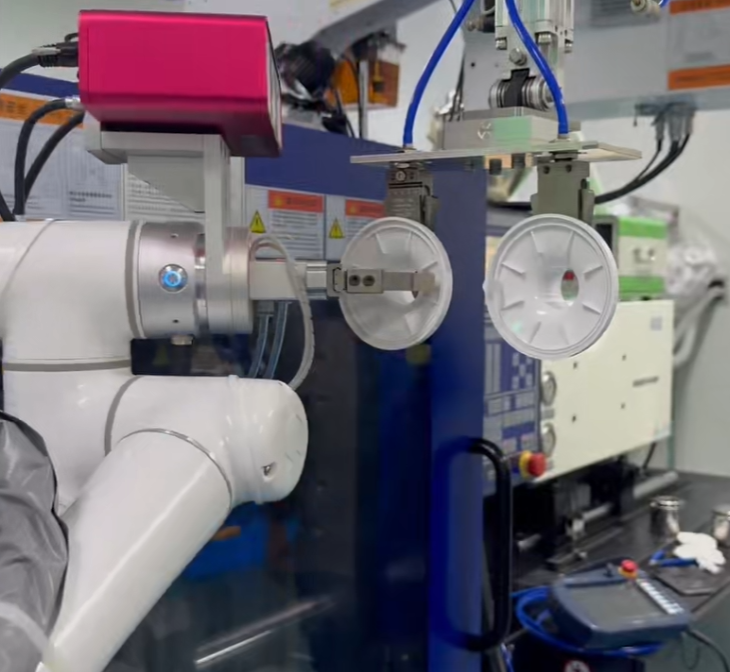
3D相机对传送带或料箱中的注塑件进行扫描,获取高精度点云数据。通过先进的成像算法,系统能够清晰分辨产品本体与料棒的三维轮廓——无论料棒是粗是细、是长是短,其空间位置和延伸方向都被精确捕捉。
第二步:智能判断,确定掰点
视觉系统并不只是简单拍照,它还要理解工艺。系统会自动识别料棒与产品的连接点,计算出最佳掰料位置和施力方向。针对不同材质的料棒——脆硬的PS、柔韧的PP,系统可以预判断裂点,确保掰断后产品本体完好无损。
第三步:引导执行,干净利落
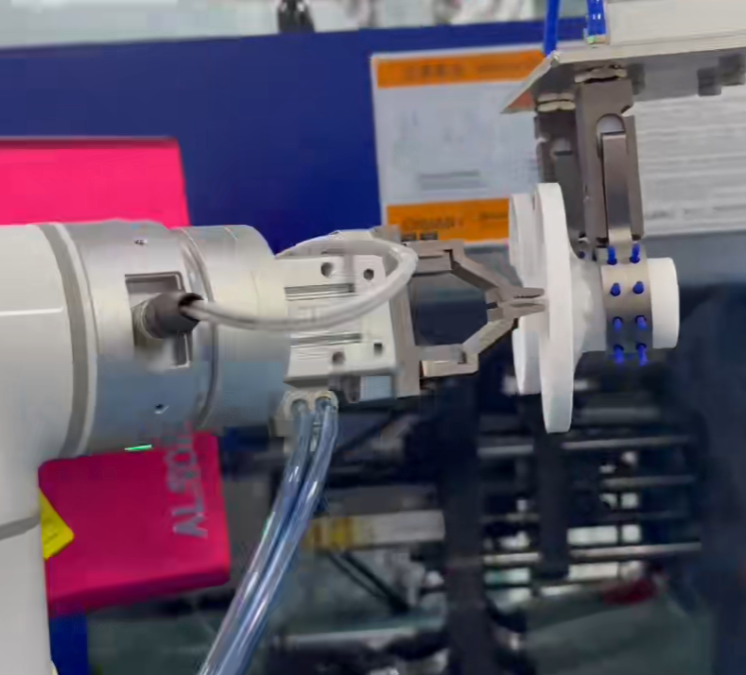
将计算出的坐标和姿态指令发送给机器人,引导其末端工具精准抵达料棒根部,以恰到好处的角度和力度完成掰断动作。整个过程行云流水,断口平整,不留残渣。
三、破解实际工况中的“疑难杂症”
注塑车间环境复杂,料棒形态多样,3D视觉引导技术在实践中练就了几项“独门绝技”:
应对高反光与黑色工件
注塑件往往具有高光泽表面,深色甚至黑色的产品更是常见,这对视觉成像构成挑战。现代3D视觉技术通过特殊的结构光设计与多模态成像,能够稳定获取高反光、深色表面的点云数据,让“隐形”的料棒无所遁形。
处理紧密连接与复杂形态
有些料棒与产品连接处面积较大,或者产品本身形状复杂,遮挡了料棒根部。深度学习算法的引入,让系统能够基于大量样本学习,即使部分被遮挡,也能准确推断出料棒的完整形态和连接位置。
适应多品种混流生产
现代注塑车间往往是多品种共线生产,不同模具出来的产品料棒位置、粗细各不相同。3D视觉引导系统无需人工干预,可自动识别当前产品的型号,调用对应的抓取策略,真正实现柔性化生产。
四、价值与展望
3D视觉引导掰料棒技术的普及,带来的不仅是人工成本的降低。它让注塑后处理环节实现了自动化,保证了掰料质量的一致性,并通过连续作业提升了整体生产的稳定性。更重要的是,它让工人从单调重复、容易疲劳的手工劳动中解放出来,转向更有价值的设备维护与工艺优化岗位。
随着视觉算法对细小特征识别能力的不断提升,以及机器人力控技术的融合,未来的3D视觉掰料系统将不仅“看得准”,更能“感得清”——以恰到好处的力度处理不同材质、不同粗细的料棒,真正实现如同人手般灵巧的自动化后处理。
这场注塑后处理的自动化革命,正由3D视觉引导技术拉开序幕。



