

在工业自动化和机器人智能化发展的进程中,3D视觉无序抓取技术已成为实现柔性生产的关键环节。该技术通过三维视觉传感器感知随机堆叠、姿态各异的物体,引导机械臂完成精准抓取。然而,传感器固有的视角局限性导致的视角遮挡问题,严重制约了3D视觉无序抓取系统的完整感知能力与作业成功率。深入解析视角遮挡的形成机理并寻求有效对策,对于提升系统在复杂真实场景中的鲁棒性具有核心意义。

一、视角遮挡的成因及其对无序抓取的影响
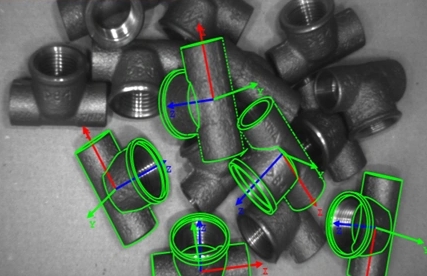
在3D视觉无序抓取场景中,物体通常被随机抛洒或堆叠在料框(bin)内,空间关系复杂。视角遮挡主要指从单一固定视角观察时,上层或外围物体完全或部分遮住了下层或内部物体的关键结构,导致传感器无法获取被遮挡物体的完整三维信息。
具体成因与挑战:
堆叠自遮挡:物体无序堆叠时,上方的物体会自然遮挡下方的物体,这是最普遍的遮挡形式。这种遮挡直接导致下层物体的抓取点(如平面、凹槽、几何中心)无法被有效识别。
容器壁遮挡:当使用料框时,靠近框壁的物体其部分表面可能被框壁遮挡,传感器只能获取物体的局部点云,给位姿估计带来极大不确定性。
相邻物体互遮挡:密集堆叠中,相邻物体侧面相互紧贴,彼此遮挡抓取所需的特征面或轮廓边缘。
这些遮挡对3D视觉无序抓取造成直接影响:
点云残缺:获取的三维点云模型不完整,存在大量数据空洞,使得基于匹配的位姿估计算法失效。
抓取点生成失败:基于深度学习的抓取点检测网络,其输入通常是局部或全局点云。严重的数据缺失会导致网络无法生成可靠抓取建议,或建议的质量(如抗扰性、成功率)急剧下降。
抓取规划冲突:由于对底层物体姿态判断错误,可能导致规划的抓取路径与实际上存在的其他物体发生碰撞。
二、应对视角遮挡的核心技术策略
为解决视角遮挡难题,提升3D视觉无序抓取系统的感知完整性,业界发展出多种技术路径,主要可分为被动优化与主动感知两大类。
1. 被动优化策略:基于单次扫描的智能推理
此策略致力于从单视角获取的不完整数据中,最大限度地推断出完整信息。
点云补全与形状重建:利用深度学习模型(如基于编码器-解码器结构的网络)学习物体的先验形状知识。当输入残缺点云时,网络能够预测被遮挡部分的几何形状,生成完整的物体三维模型,为后续抓取位姿估计提供良好基础。这种方法高度依赖于训练数据的质量和泛化能力。
基于部件的抓取检测:不强求恢复物体的完整几何模型,而是直接在被遮挡物体可见的局部部件上,检测可行的抓取点。例如,即使只看到一个箱体的一个角,也能推断出该角附近可能存在的平面,并规划抓取。这种方法将问题从“完整识别”转向“局部可用性判断”,更具实用性。
多假设生成与验证:算法基于可见部分生成多个可能的目标位姿假设,并在抓取执行过程中(如通过力传感或二次视觉)进行快速验证与调整。
2. 主动感知策略:通过视点移动获取多视角信息
这是从根本上解决遮挡问题的最直接方法,即改变传感器或场景的相对位置,从不同角度观测目标。
传感器主动移动(眼在手上):将3D视觉传感器安装在机械臂末端。系统首先从固定视角(如顶部)进行初始扫描,识别出部分可抓取目标。完成一次抓取后,或当感知到严重遮挡时,控制机械臂携带传感器移动到新的、经过计算的最佳视角,对剩余物体进行再次扫描,从而“看到”之前被遮挡的区域。
多传感器融合:在料框周围部署多个固定位置的3D传感器,从不同角度(如正上方、侧方)同时或分时采集点云数据。通过精确的手眼标定和点云配准技术,将多视角点云融合成一个更完整、遮挡更少的场景模型。此方法对系统标定精度和计算实时性要求较高。
场景扰动:在无法通过移动传感器获得更好视角时,采取“推动以观察”的策略。即控制机械臂执行一次安全的非抓取性推动作业,轻轻扰动堆叠的物体,改变其布局,使被遮挡的物体暴露出来,然后重新扫描。这是一种巧妙的间接主动感知方式。
三、系统集成与未来展望
在实际部署3D视觉无序抓取系统时,往往需要将上述策略进行有机结合。一个典型的流程可能是:首先利用固定顶视相机进行全局扫描,识别出表层易抓取物体;随着抓取进行,遮挡问题凸显,系统切换至“眼在手上”模式,进行针对性局部扫描;对于极度复杂的堆叠,可能还需引入轻量级的推动策略。
未来,应对视角遮挡的研究将朝着更智能、更融合的方向发展:
闭环感知与决策:将遮挡分析深度融入抓取决策循环。系统不仅能检测遮挡,还能评估遮挡的严重程度,并主动决策是执行“局部抓取”、“换视角再看”还是“先推一下”,形成感知-决策-执行的闭环优化。
仿真与真实数据驱动:利用高保真物理仿真引擎,生成海量包含各种复杂遮挡场景的合成数据,用以训练更强大的点云补全、抓取点检测和视点规划模型,降低对昂贵真实标注数据的依赖。
多模态信息融合:结合3D视觉以外的信息,如二维纹理信息(用于物体识别)、力量反馈(用于接触感知)甚至声音,综合判断遮挡物后方的情况,做出更可靠的抓取规划。
总之,视角遮挡是3D视觉无序抓取技术迈向普适化应用必须逾越的障碍。通过被动推理与主动感知相结合的混合策略,并逐步引入更高级的闭环智能,能够有效提升系统在存在严重遮挡的复杂无序环境中的抓取成功率和作业效率,为真正智能化的柔性制造奠定坚实的技术基础。



