

摘要
在高度定制化与需求瞬息万变的现代制造环境中,生产线需要频繁、快速地更换加工对象。工件型号的频繁切换对传统固定编程的自动化系统提出了严峻挑战。作为智能制造的“慧眼”,3D视觉引导技术凭借其强大的环境感知与智能决策能力,正成为实现产线高适应性、高柔性的核心使能技术。本文旨在深度解析3D视觉引导技术在应对工件型号切换时所展现的关键适应性原理、核心技术要素及其为柔性制造带来的变革性价值。
一、 引言:柔性制造的挑战与3D视觉引导的机遇
传统自动化生产线依赖于精密的机械定位与预设程序,一旦工件型号、尺寸、来料姿态发生变化,往往需要耗时进行机械调整、程序重编与人工示教,导致生产线停滞,严重制约了多品种、小批量生产模式的经济性。生产的柔性化、智能化升级成为必然趋势。在此背景下,3D视觉引导技术应运而生,它通过获取工件的三维点云数据,实时解析其空间状态,动态引导机器人或执行机构完成精准作业。其核心价值在于将“以固定程序适应固定工位”的模式,转变为“以实时感知适应变化对象”的智能模式,从而为工件型号的“无缝”切换提供了技术基石。
二、 3D视觉引导适应型号切换的核心技术适应性解析
工件型号切换的本质是识别对象、理解任务、调整执行的动态过程。3D视觉引导系统的适应性贯穿始终,主要体现在以下几个层面:
1. 信息获取的维度适应性:从二维到三维的质变
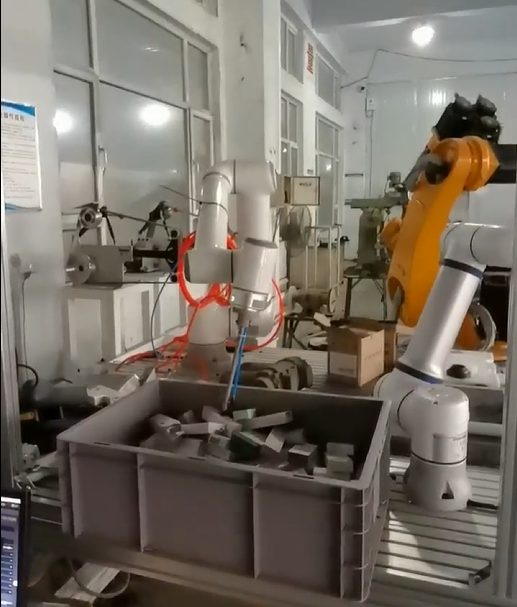
相比2D视觉,3D视觉引导能获取物体的深度、轮廓高度、曲面形状等完整三维信息。当切换工件型号时,即使新工件在二维投影上与旧工件相似,其三维几何特征的差异也能被清晰捕获。这使得系统能够有效区分型号间的细微差别(如凸起、凹槽、厚度变化),并准确测量其在空间中的六自由度位姿(X, Y, Z, Rx, Ry, Rz),为后续的精准引导提供了不可替代的、鲁棒的数据基础。
2. 识别与定位的算法适应性:基于特征与模型的智能匹配
面对新工件,3D视觉引导系统无需完全重新开发算法。其核心依赖于先进的视觉算法库:
基于三维特征的匹配: 系统可提取点云中的关键几何特征(如边线、角点、平面、圆柱面)进行匹配。只要在新工件模型中定义了可区分的特征组合,系统便能快速学习并识别。
基于全局模型的匹配: 通过将实时采集的点云数据与预先导入的工件三维CAD模型进行配准(如迭代最近点算法ICP及其变种),系统能直接计算出当前工件相对于标准模型的精确位姿偏差。切换型号时,操作员仅需在系统中更换或添加对应的CAD模型文件,并设定新的抓取点或作业点,算法框架本身无需改变,展现了强大的软件层面的适应性。
3. 引导策略的程序适应性:参数化与离线编程的融合
真正的适应性不仅在于“看得见”,更在于“动得准”。3D视觉引导系统通常与机器人控制系统深度集成,形成“感知-决策-执行”闭环:
坐标系的动态建立: 视觉系统每次识别工件后,都会在机器人坐标系中动态建立一个“工件坐标系”。机器人所有的运动轨迹都将基于此实时坐标系进行计算,而非固定的机械坐标。因此,无论工件以何种角度、位置出现在视野内,机器人都能“知道”从哪里开始作业。
程序与数据的解耦: 机器人的作业路径程序可以与具体的工件型号数据(模型、抓取点)解耦。通过参数化设计,同一套机器人引导程序框架,通过调用不同的视觉识别结果和作业参数,即可适应不同型号的工件,极大降低了重新编程的工作量,实现了“一套程序,多种工件”的柔性。
4. 对复杂环境的鲁棒性适应性:抗干扰与自纠偏
实际生产环境中,来料姿态随机、背景干扰、光照变化、工件表面反光或颜色差异都是常见挑战。3D视觉引导,特别是基于结构光或激光扫描的技术,受环境光影响相对较小。同时,先进的点云处理算法具备滤波、去噪、分割能力,能从杂乱场景中鲁棒地提取目标工件。当型号切换导致工件表面反射特性变化时,系统可通过调整视觉传感器参数或应用更通用的点云处理流程来维持稳定性能。
三、 实现高效型号切换的流程与优化
基于3D视觉引导的快速切换通常遵循标准化流程,以最大化适应性优势:
前期准备(离线): 为新工件建立精确的三维数字模型(CAD),并在仿真环境中定义好特征识别区域、机器人抓取点、作业路径关键点等。
现场切换(在线): 在生产线上,操作人员通过人机界面(HMI)选择即将生产的新工件型号。系统自动加载对应的模型文件与工艺参数。
自动标定与验证(可选): 对于精度要求极高的场景,系统可引导执行一次快速的视觉-机器人手眼标定验证,或利用一个样品进行位姿识别验证,确保参数无误。
投入生产: 系统进入自动运行状态,对随机来料的新型号工件进行实时识别、定位,并引导机器人完成抓取、装配、加工等任务。
优化方向包括:建立集中化的型号工艺数据库,实现“一键切换”;开发更智能的自学习算法,减少对新模型人工标注的依赖;提升3D视觉传感器的扫描速度与分辨率,以应对更快速的生产节拍和更精密的工件。
四、 结论与展望
3D视觉引导技术通过赋予自动化系统以实时感知、理解与决策三维空间的能力,从根本上解决了工件型号快速切换中的识别、定位与引导难题。其适应性不仅体现在技术维度上从二维到三维的拓展,更体现在算法框架的通用性、引导策略的柔性以及系统整体的鲁棒性上。它使得生产线能够像“熟练工人”一样,用“眼睛”和“大脑”适应新的工作对象,而非依赖僵硬的固定设置。
随着3D视觉传感器成本的持续下降、算法算力的不断提升以及人工智能(尤其是深度学习在点云处理中的应用)的深度融合,未来的3D视觉引导系统将变得更加智能、高效和易用。它将继续作为智能制造的核心技术之一,驱动制造业向更高水平的柔性化、个性化与智能化方向演进,为“工业4.0”愿景下的敏捷制造奠定坚实的基础。



